如何利用五镜头倾斜数据在CC中进行立体建模~

一、数据准备
(1)1-5分别为五组镜头的影像;kzd为控制点坐标以及照片(为避免后期麻烦,控制点坐标提前转化为csv格式)、pos为飞机飞行所生成的pos数据;
(2)pos数据用excel打开,修改名称,使每一组相机下面的每一张相片有与之所对应的pos数据,并修改ID。
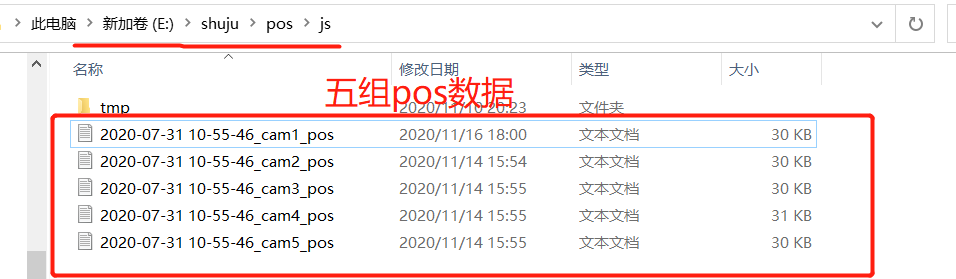
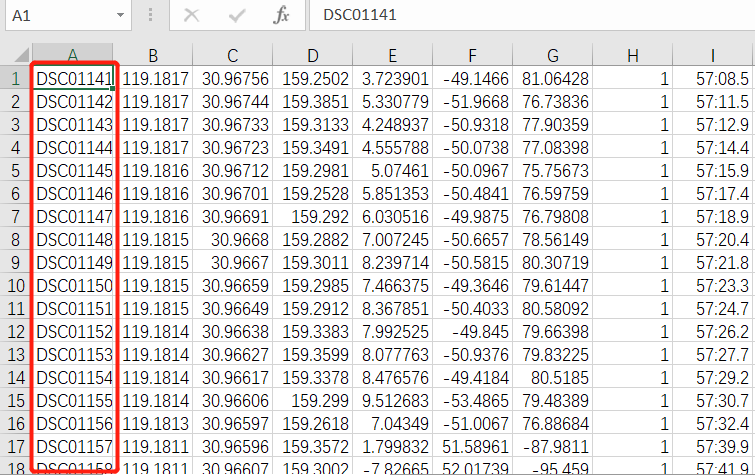
在excel中把五组pos数据修改完,保存。

软件为CC软件(原Smart3D)
二、操作流程
打开软件(黑色的ContextCapture Center Master),新建工程文件,必须在英文状态下,不能出现特殊符号以及汉字(运行黑色软件前,先打开驱动软件ContextCapture Center Engine,红色的这个)
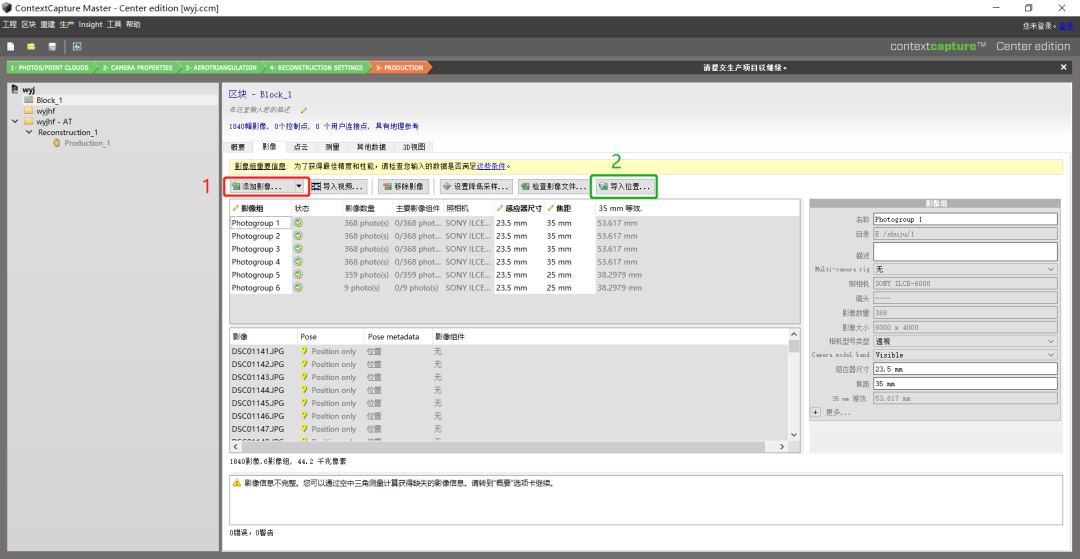
(1)添加影像,添加整个目录,选择第一个影像文件,导入位置
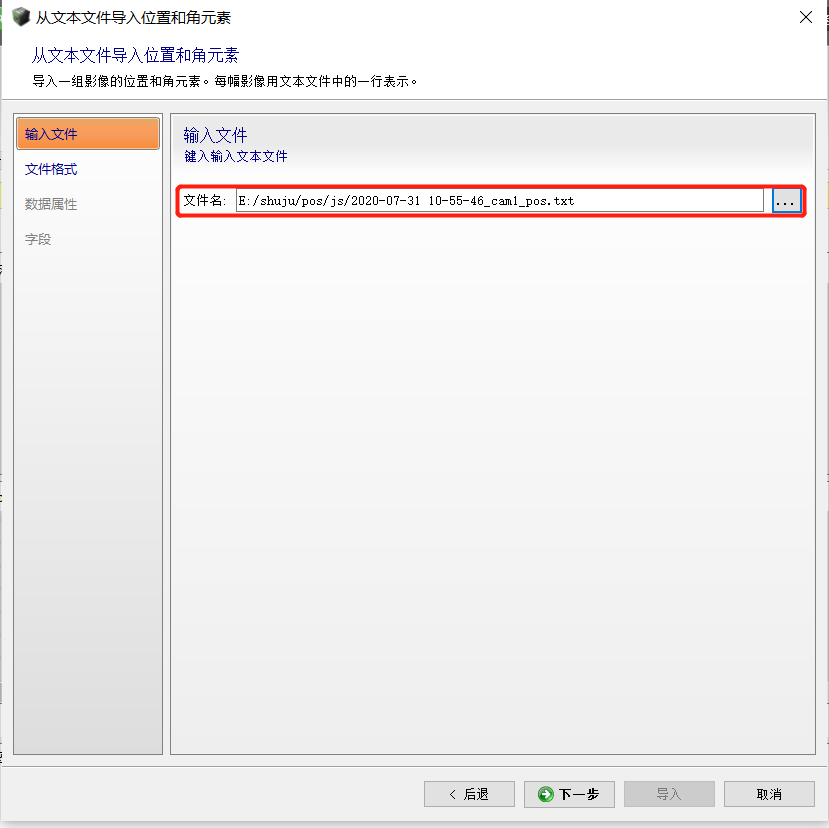
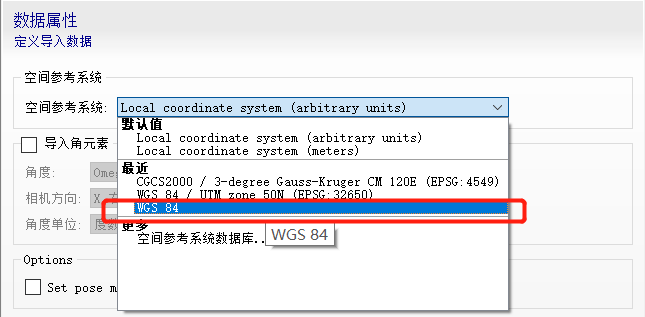
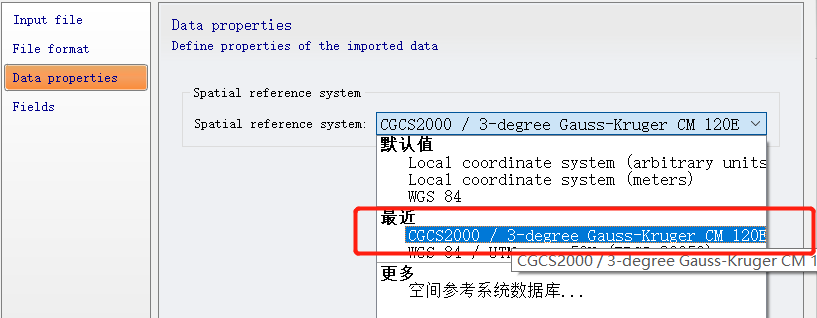
(2)选择第一组影像文件,下一步,在数据属性里面选择合适的地理参考,这里选择WGS 84(导入角元素可以使相片匹配更加精确,但是比较费事及造成程序卡顿,故不建议勾选),下一步
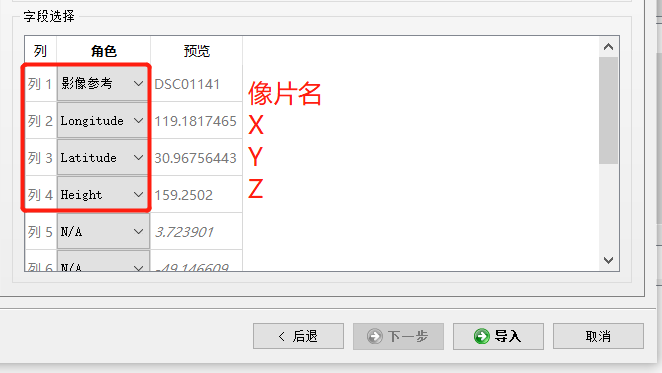
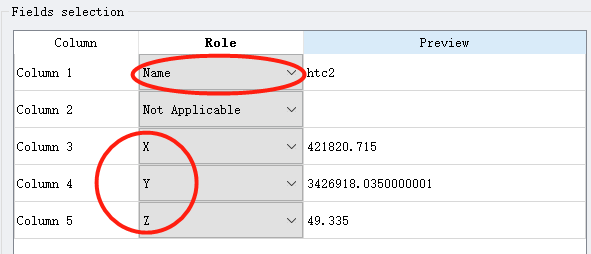
(3)修改字段选择里面的内容,只修改前四行,其他的保持N/A默认
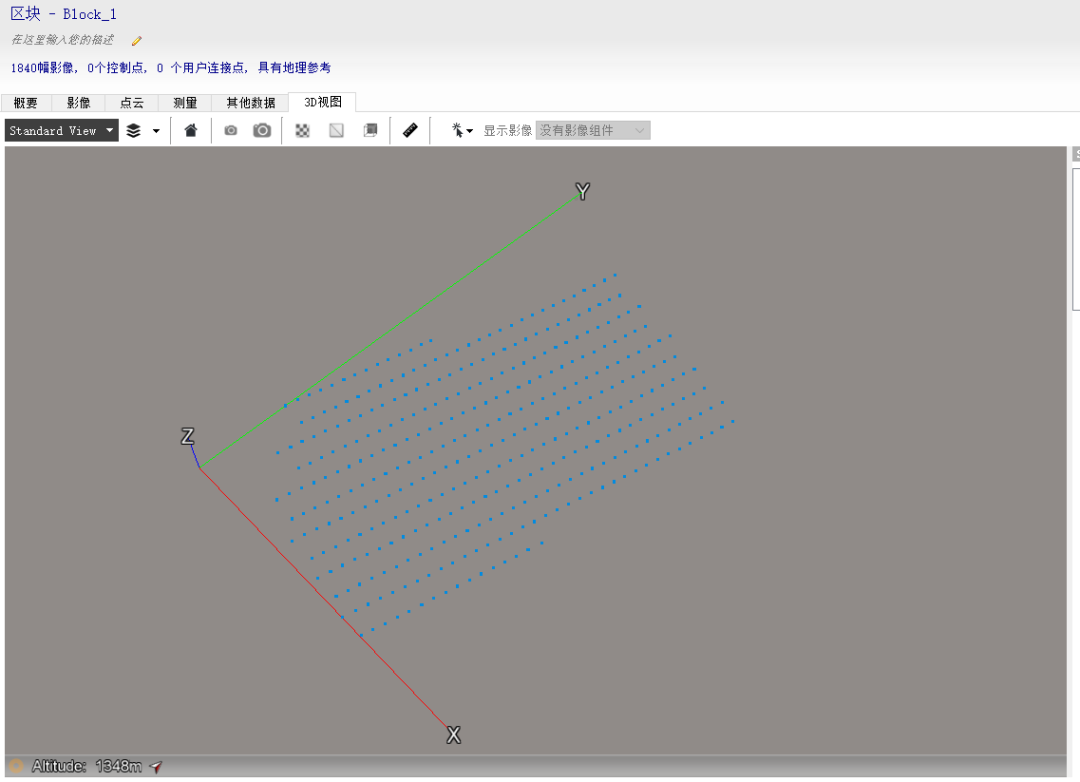
(4)点击导入,根据相机镜头,在影像任务栏下修改正确的焦距(一般前四组镜头为倾斜镜头,后一组镜头为正射镜头,故前四组与后一组镜头焦距有差异),导入后看是否提示成功,并在3D视图里面查看航带的正确性,与坐标轴是否有交叉重合等问题。
5.加载影像与pos数据要一组一组分开加,这样容易使每一个pos数据匹配到对应的一张像片,此前操作为第一组镜头的pos导入方法,后四组操作与前面相同。
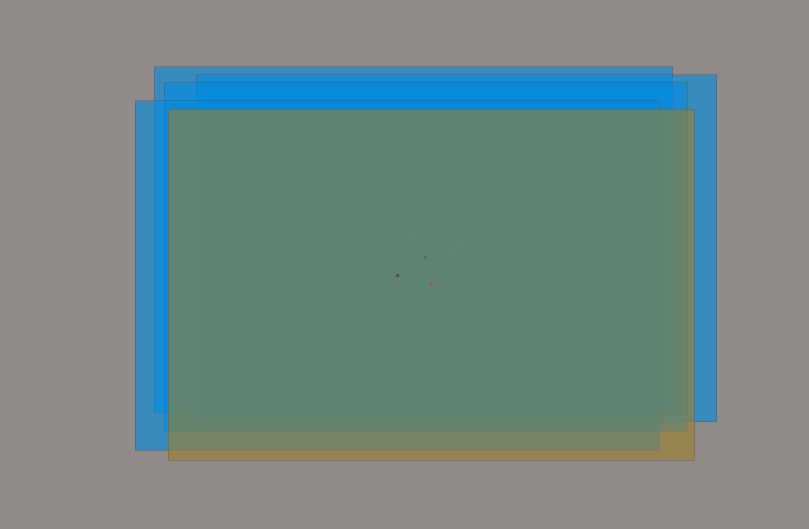
6.待五组数据都加载进去后,点开3D试图,放大一组影像,看5张照片有没有重合到一起,如下所示就是合适的数据:
三、空三处理
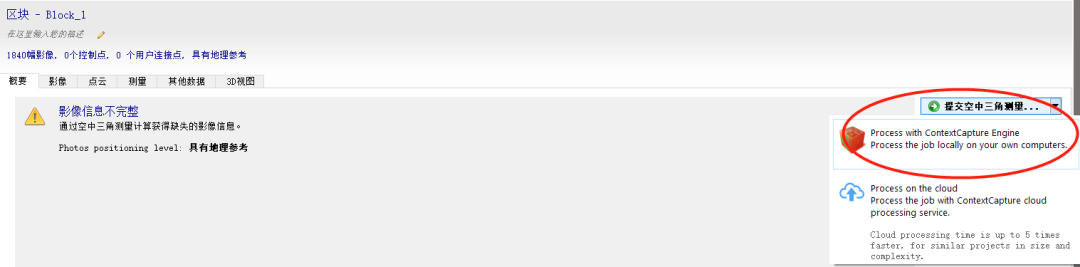
(1)点击概要,提交空中三角测量,点击第一个
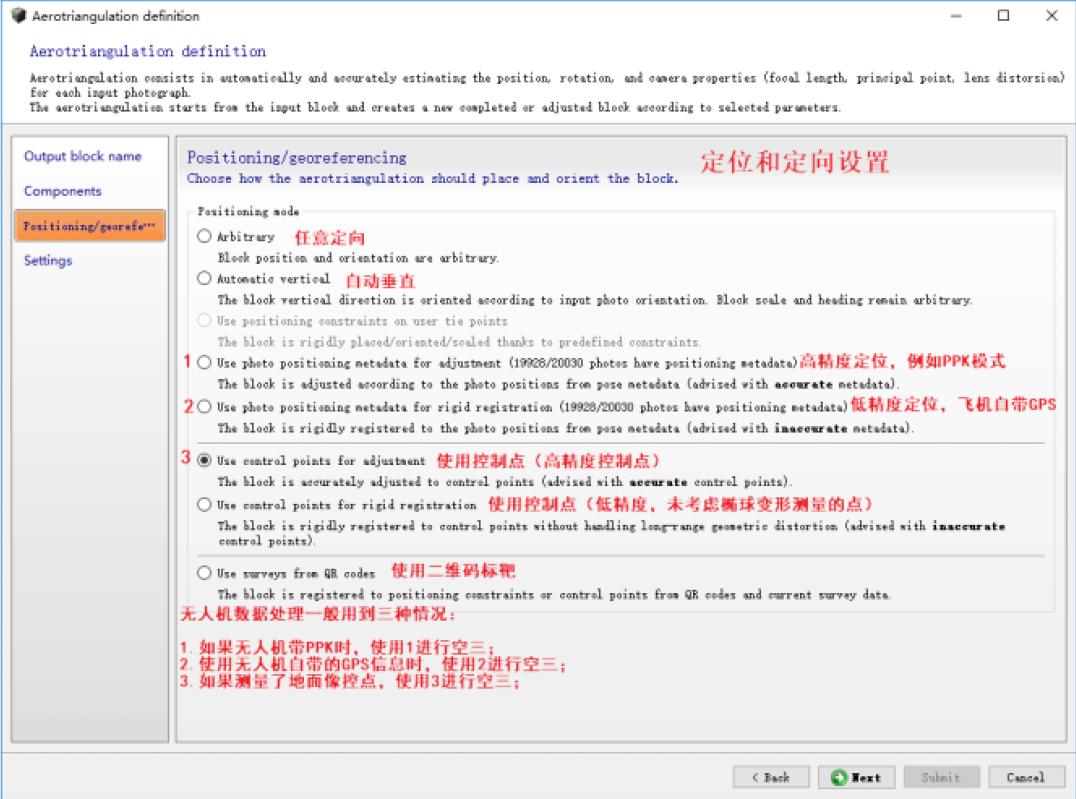
(2)修改名称或者默认都行,点击下一步,修改定位模式为第四个
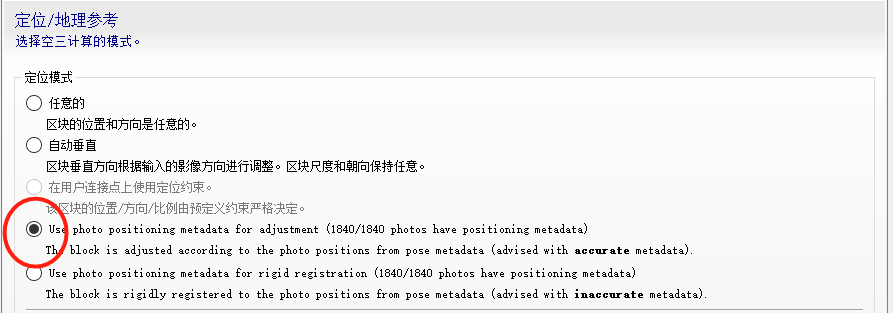
(根据类型,选择适合任务需求的空三计算模式)
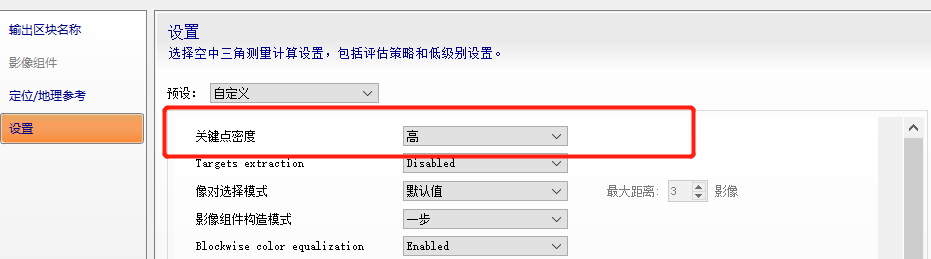
(3)设置,关键点密度修改为高
(4)点击提交,开始初次空三,目的为给每张像片匹配pos数据。
四、加控制点,刺点
(1)点击测量,点击1,点击2
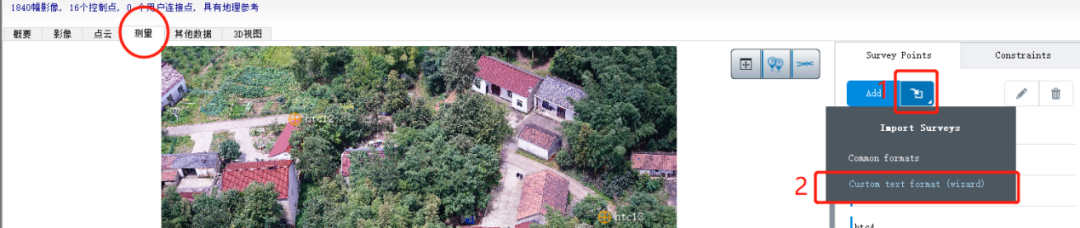
(2)导入csv格式的控制点文件,点击下一步

这儿改为0,意思是在csv格式的文件里从第几行开始 ,完了点击下一步
(3)在这里选择合适的地理坐标系
(4)只修改这四项,其他的保持默认,如果合适的话点击提交
(5)这样,所有的控制点就加载进去了,接下来准备刺点
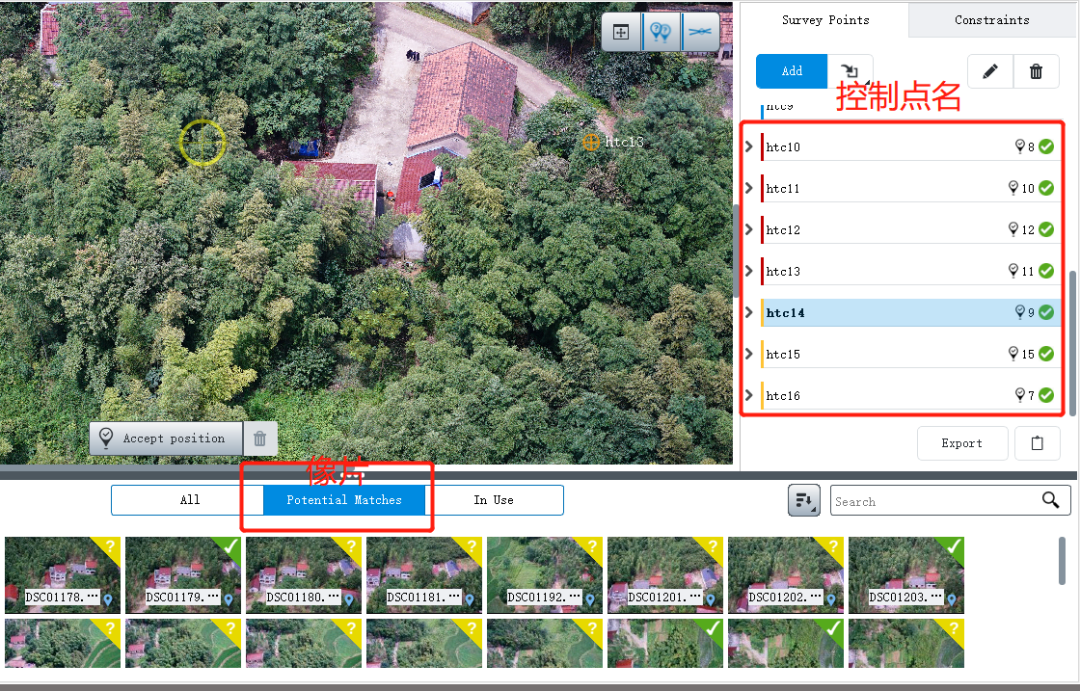
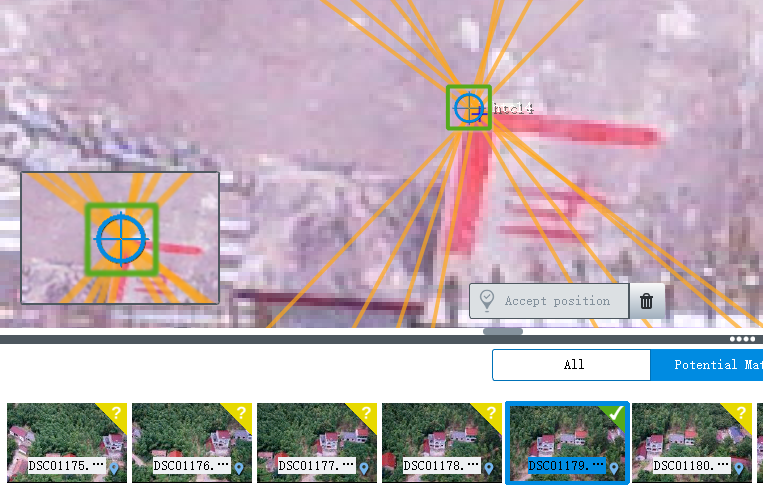
(6)单击点名,在下方任务栏里弹出匹配到的像片,选择成像质量好的像片,按住shift刺点,成功后如图所示
(7)刺完点,保存,重新跑一遍空三,点击下一步,选择使用所有影像,选择使用控制点进行平差,其他默认,选择提交。
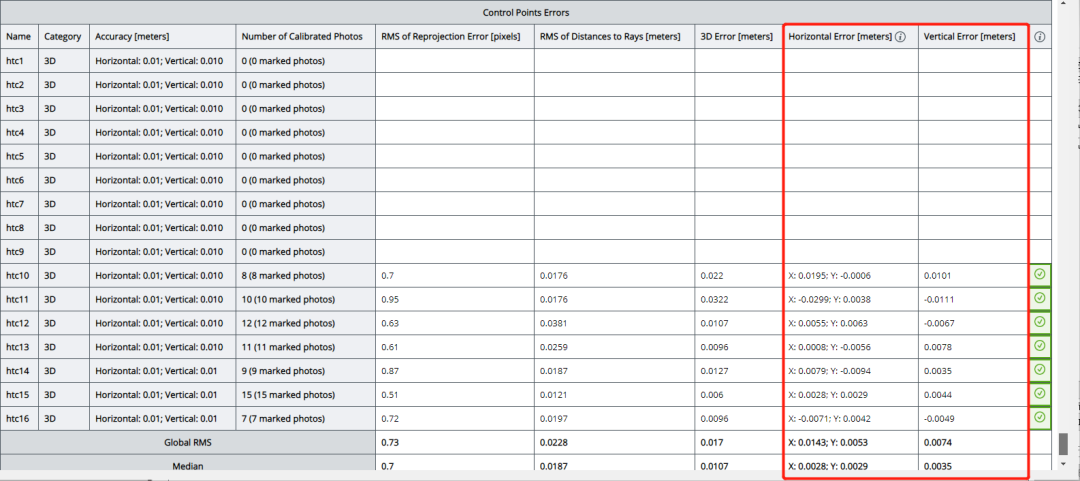
(8)等空三跑完之后,点击View quality report查看空三精度报告
五、模型重建
(1)点击新建重建项目

(2)新建重建项目

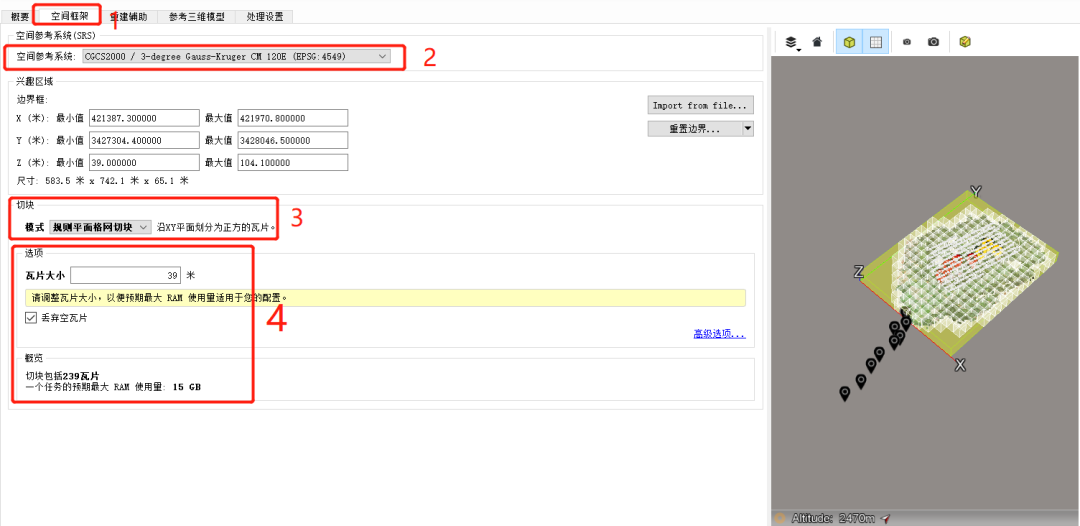
3.点击空间框架1,设置空间参考系统2,跟加控制点时的系统选择一致,切块模式选择为规则平面格网切块3,设置瓦片大小(瓦片大小可根据自己电脑的运行内存改变大小,注意,不能超过电脑的运行内存,否则可能导致死机,卡退等状况)